Examples
Basic Examples (3)
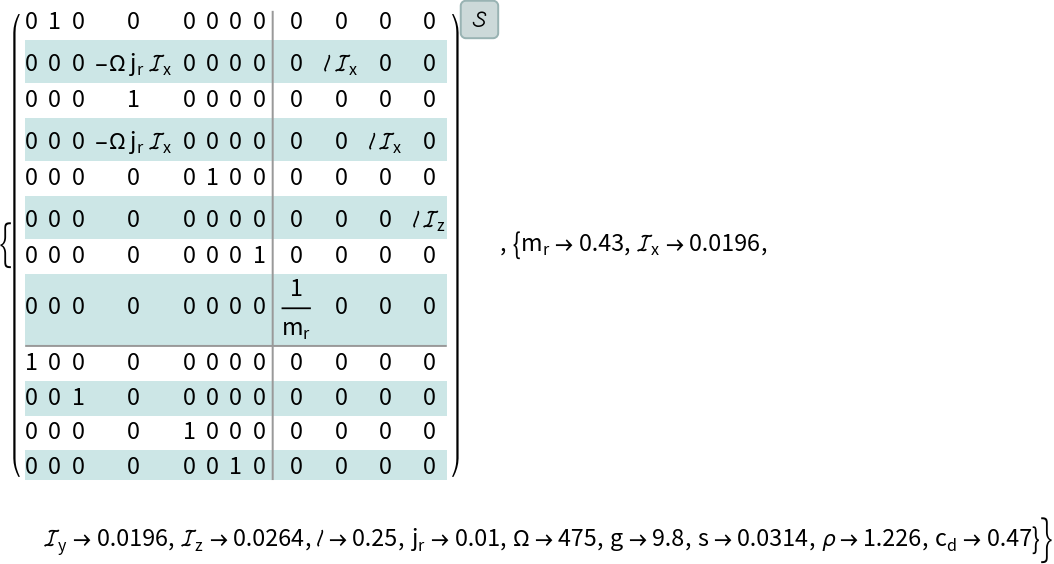
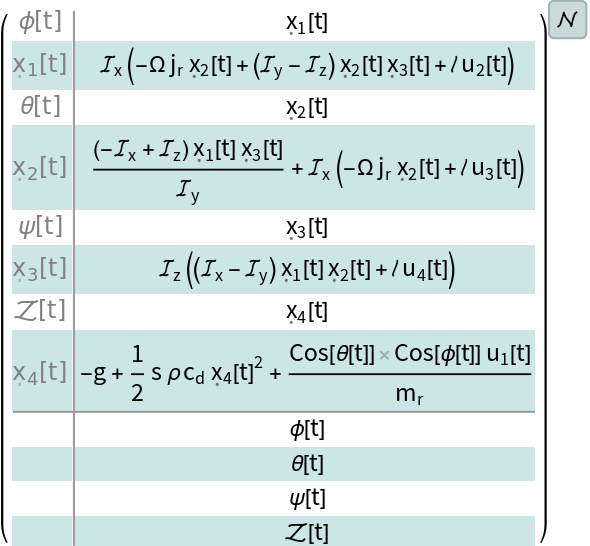
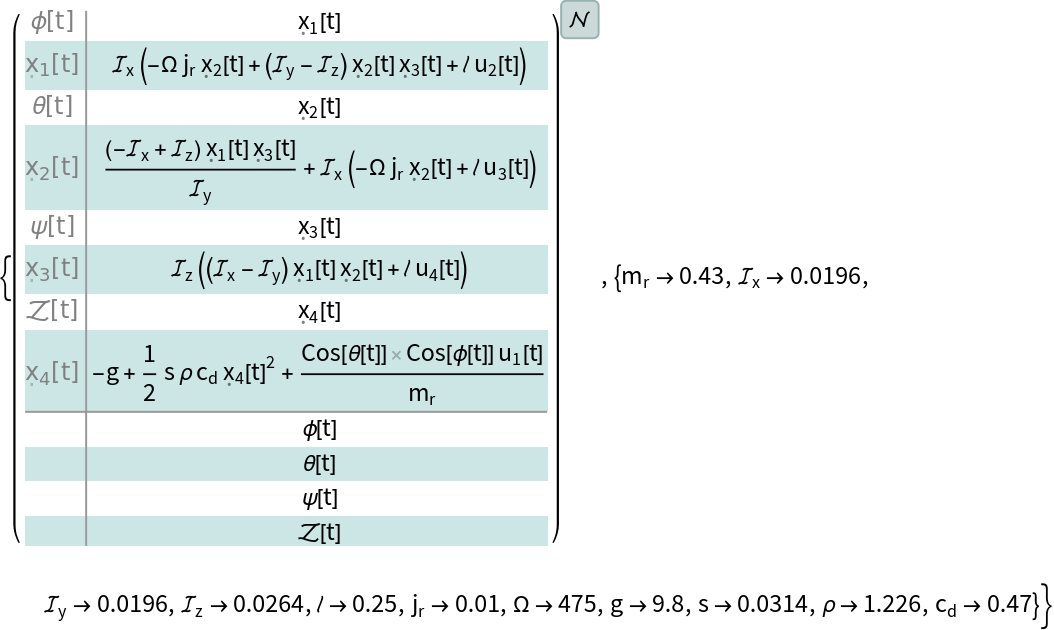
Retrieve the model:
The icon:
The annotation:
Scope & Additional Elements (4)
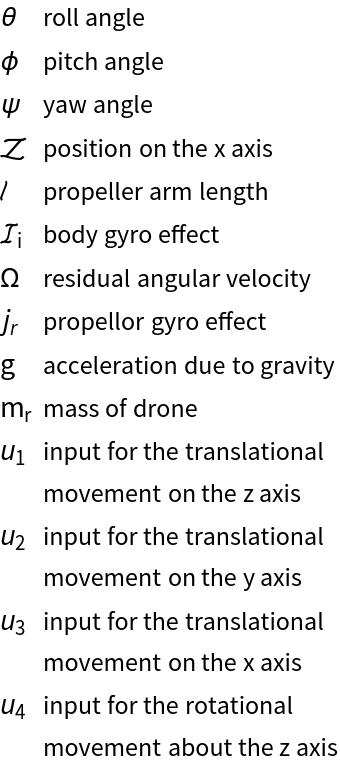
Available content elements:
The available model types:
The operating point:
The parameters:
Visualizations (2)
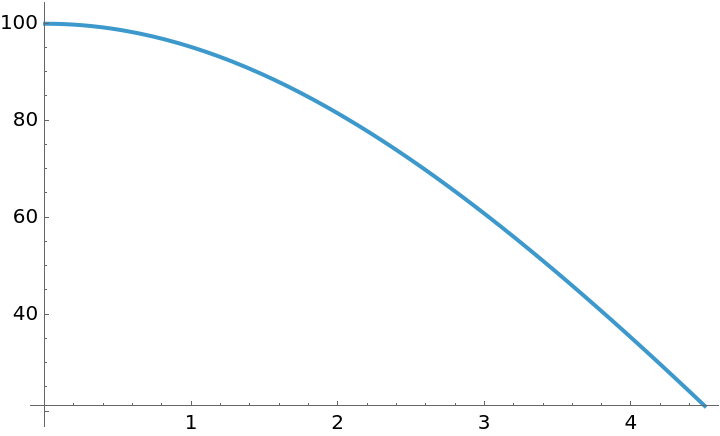
The drone is in free-fall without any inputs:
A plot of the drone's vertical position:
Analysis (3)
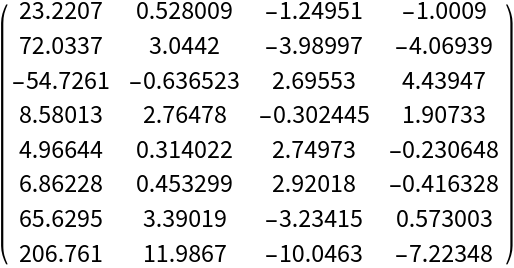
Compute a set of estimator gains for the linear model:
The model's eigenvalues:
Compute a set of estimator gains:
Bibliographic Citation
Suba Thomas,
"Quadcopter Drone Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information

![{nssm, pars} = Table[ResourceData[\!\(\*
TagBox["\"\<Quadcopter Drone Model\>\"",
#& ,
BoxID -> "ResourceTag-Quadcopter Drone Model-Input",
AutoDelete->True]\), elem], {elem, {"NonlinearStateSpaceModel", "Parameters"}}]](https://www.wolframcloud.com/obj/resourcesystem/images/0a0/0a030571-0f4c-4d55-871d-653e5809a2cb/2970c2d43416908b.png)
![{ssm, pars} = Table[ResourceData[\!\(\*
TagBox["\"\<Quadcopter Drone Model\>\"",
#& ,
BoxID -> "ResourceTag-Quadcopter Drone Model-Input",
AutoDelete->True]\), e], {e, {"StateSpaceModel", "Parameters"}}]](https://www.wolframcloud.com/obj/resourcesystem/images/0a0/0a030571-0f4c-4d55-871d-653e5809a2cb/4724409fb60c72e7.png)