Wolfram Data Repository
Immediate Computable Access to Curated Contributed Data
3D model of a wrench
| “Description" | description |
| “LongDescription" | long description |
| “Name" | English name |
| “StandardName" | standard English name |
| "MeshRegion" | mesh region representation |
| "Region" | region representation |
| "PolygonCount" | number of polygons |
| "VertexCount" | number of vertices |
| "ConnectedComponents" | number of connected components |
| "BoundingBox" | bounding box |
| "Summary" | summary information |
Retrieve the model:
| In[1]:= |
| Out[1]= |  |
Summary properties:
| In[2]:= |
| Out[2]= | 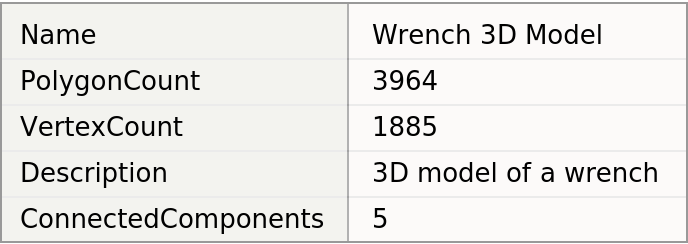 |
Find the inertia matrix centered at point (-8, -0.168, 0):
| In[3]:= |
| Out[3]= | 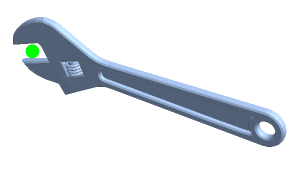 |
| In[4]:= |
| Out[4]= |
Wolfram Research, "Wrench" from the Wolfram Data Repository (2022)