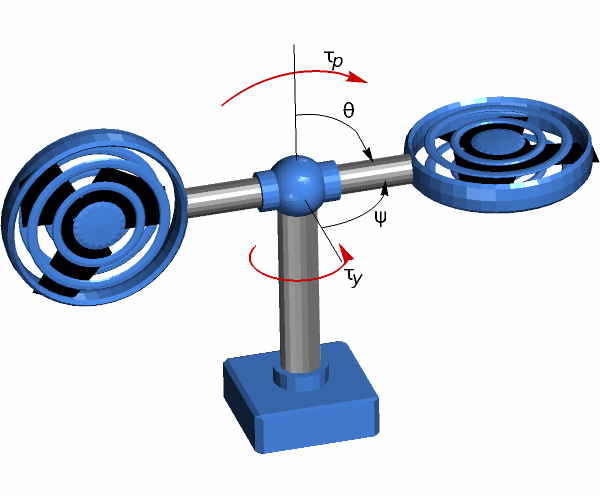
A model of a helicopter with two degrees of freedom (2 DOF)
Examples
Basic Examples (3)
Retrieve the model:
The icon:
The annotation:
Scope & Additional Elements (4)
Available content elements:
The available model types:
The operating point:
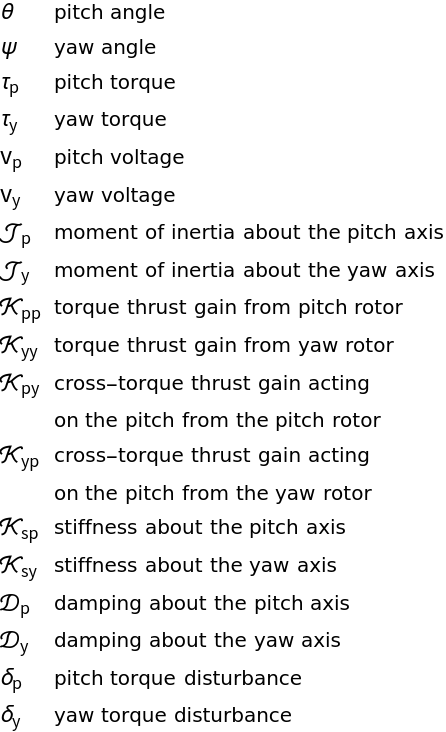
The parameters:
Analysis (3)
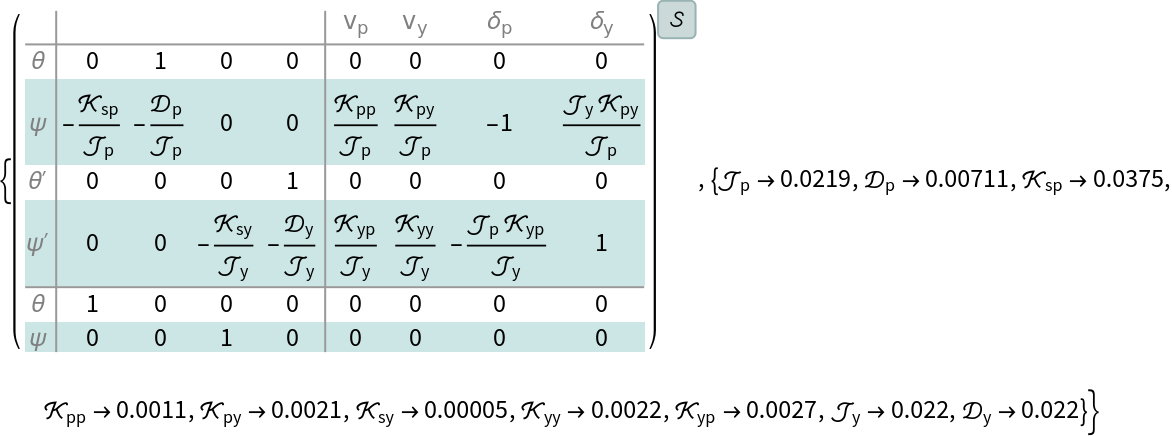
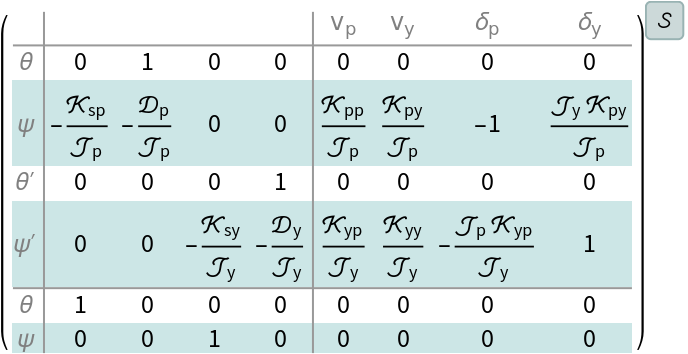
The state space model and its parameters:
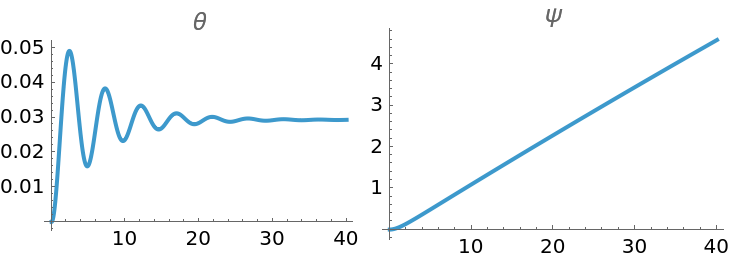
A step input to the pitch motor affects the pitch and yaw simultaneously:
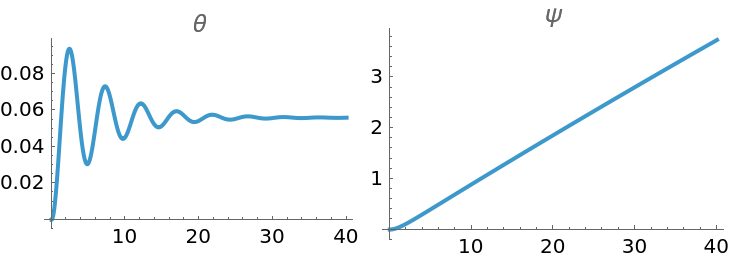
As does a step input to the yaw motor:
Bibliographic Citation
Suba Thomas,
"2 DOF Helicopter Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information

![{ssm, pars} = Table[ResourceData[\!\(\*
TagBox["\"\<2 DOF Helicopter Model\>\"",
#& ,
BoxID -> "ResourceTag-2 DOF Helicopter Model-Input",
AutoDelete->True]\), elems], {elems, {"StateSpaceModel", "Parameters"}}]](https://www.wolframcloud.com/obj/resourcesystem/images/138/138beb1c-5cbe-4220-8ddd-c0db9b969a9e/641c18c7aabb831d.png)