Examples
Basic Examples (2)
Retrieve the model:
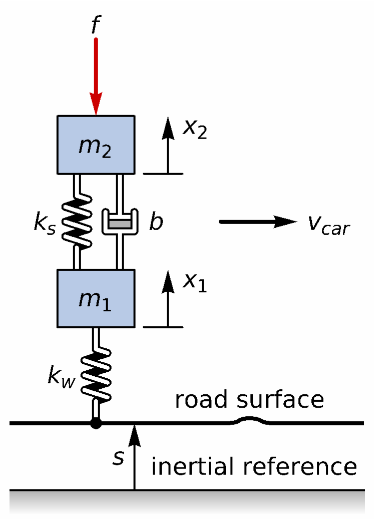
The icon:
Scope & Additional Elements (4)
Available content elements:
The available model types:
The operating point:
The parameters:
Visualizations (3)
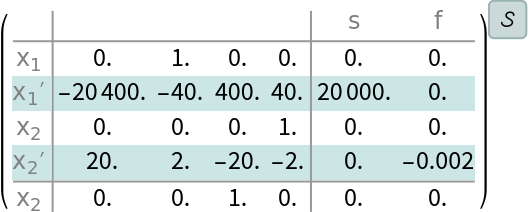
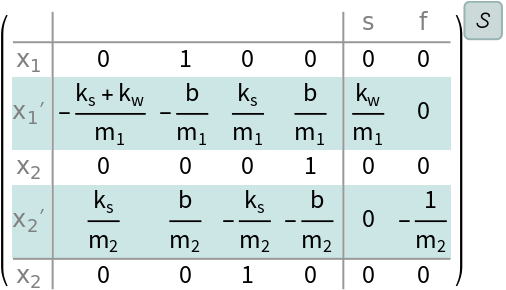
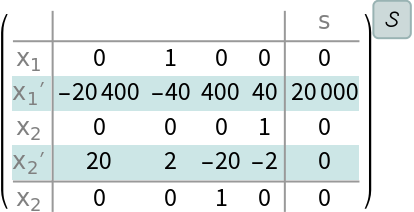
The numerical model:
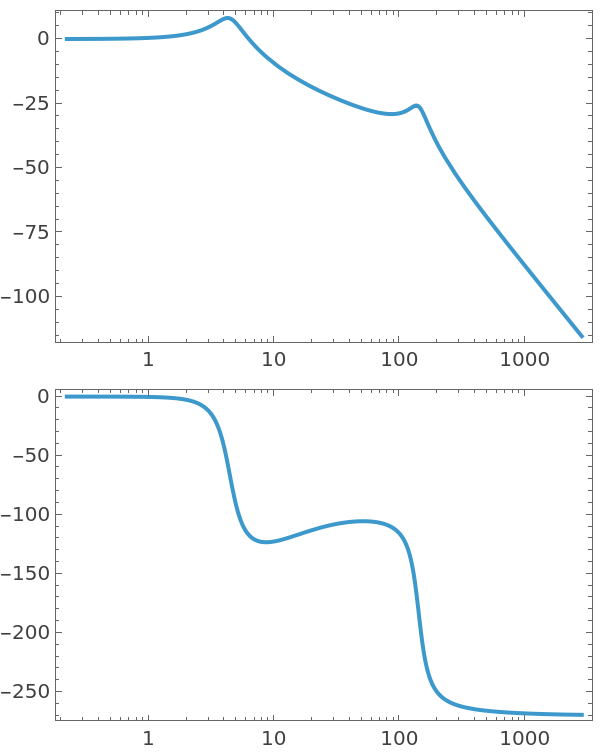
Extract the subsystem from input s to output x2:
Its Bode plot:
Analysis (7)
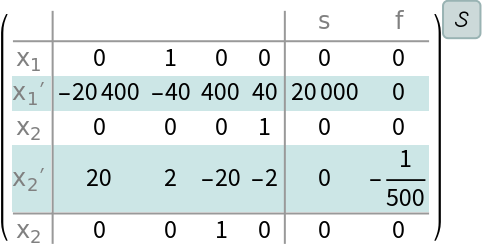
The numerical model:
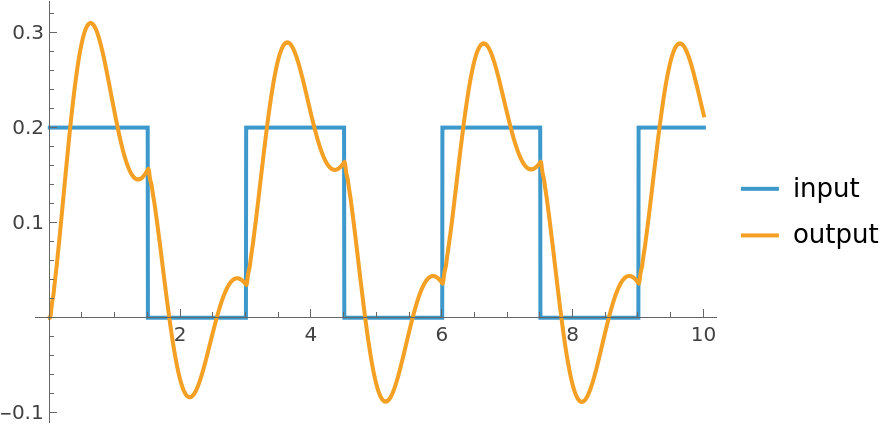
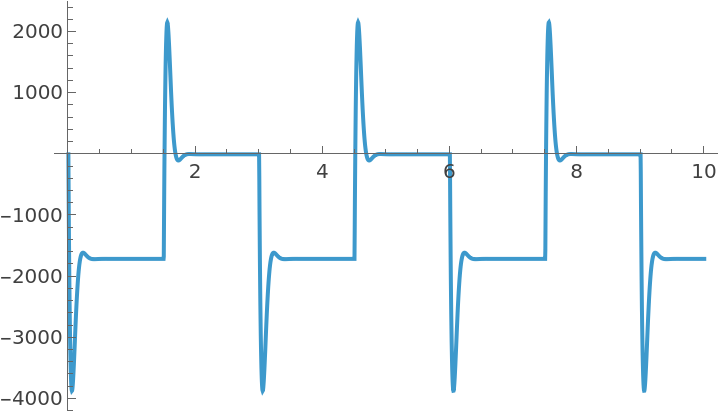
Simulate the suspension on a bumpy surface:
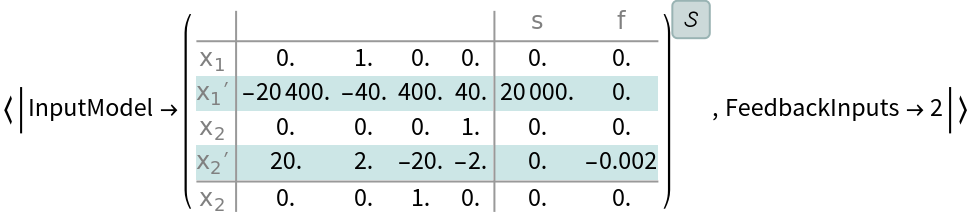
A system specification for a controller design that attenuates the oscillations:
An LQ-regulator:
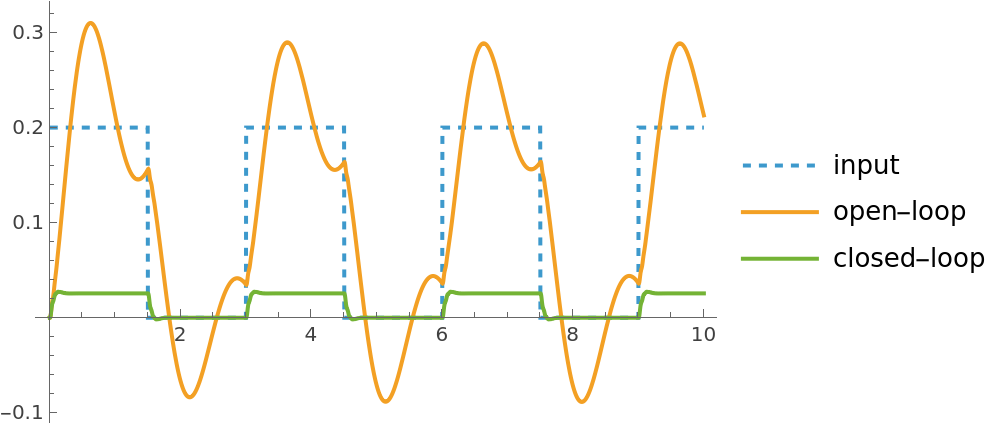
Simulate the closed-loop system:
The oscillations are attenuated by the controller:
The control effort:
Bibliographic Citation
Suba Thomas,
"Quarter-Car Suspension Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information

![sys = ResourceData[\!\(\*
TagBox["\"\<Quarter-Car Suspension Model\>\"",
#& ,
BoxID -> "ResourceTag-Quarter-Car Suspension Model-Input",
AutoDelete->True]\)] /. ResourceData[\!\(\*
TagBox["\"\<Quarter-Car Suspension Model\>\"",
#& ,
BoxID -> "ResourceTag-Quarter-Car Suspension Model-Input",
AutoDelete->True]\), "Parameters"]](https://www.wolframcloud.com/obj/resourcesystem/images/22d/22da781e-1707-4f5c-a457-372bb7356a26/37e55abf9854e594.png)
![ssm = ResourceData[\!\(\*
TagBox["\"\<Quarter-Car Suspension Model\>\"",
#& ,
BoxID -> "ResourceTag-Quarter-Car Suspension Model-Input",
AutoDelete->True]\)] /. ResourceData[\!\(\*
TagBox["\"\<Quarter-Car Suspension Model\>\"",
#& ,
BoxID -> "ResourceTag-Quarter-Car Suspension Model-Input",
AutoDelete->True]\), "Parameters"] // N](https://www.wolframcloud.com/obj/resourcesystem/images/22d/22da781e-1707-4f5c-a457-372bb7356a26/6f286663fe668b0f.png)