Examples
Basic Examples (3)
Retrieve the model:
The icon:
The annotation:
Scope & Additional Elements (5)
Available content elements:
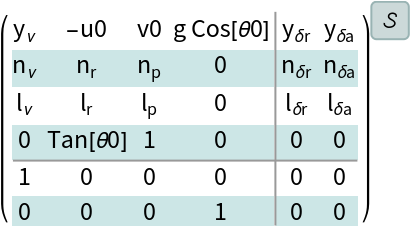
The transfer function model:
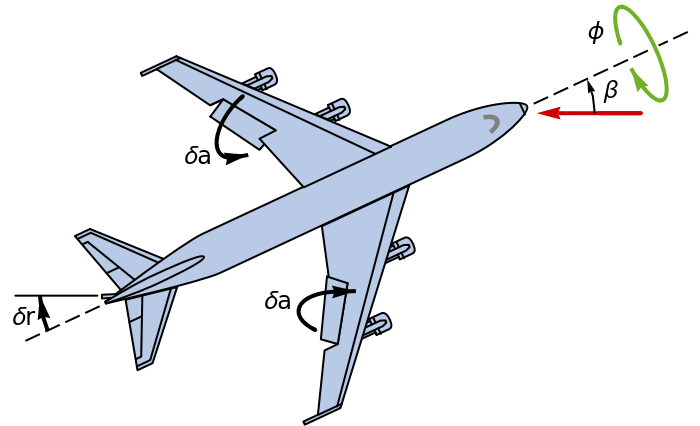
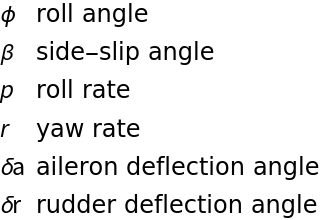
The input variables:
Other variables:
Temporal variable:
Analysis (4)
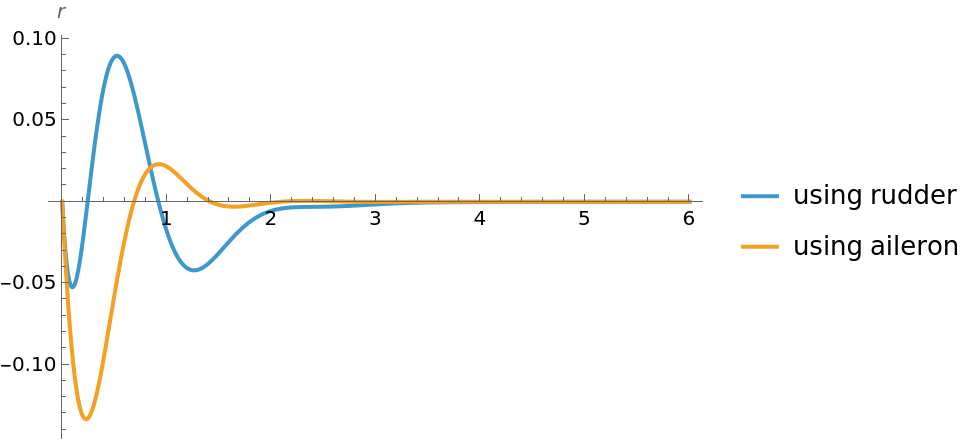
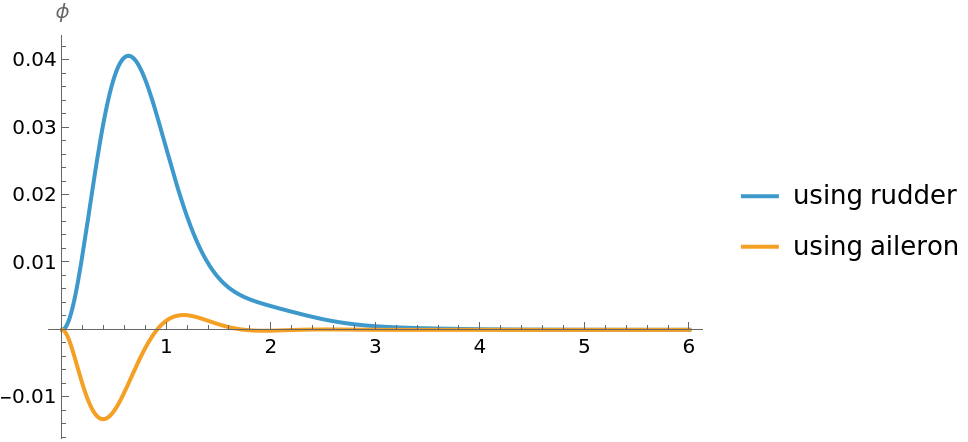
Obtain a state-space model with the rudder and another with aileron as the sole input:The closed-loop systems of both systems with an LQR controller:Using the rudder results in a faster yaw response:As well as a smaller roll angle:
Bibliographic Citation
Suba Thomas,
"747 Lateral Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information

![{ssmR, ssmA} = Table[SystemsModelExtract[ResourceData[\!\(\*
TagBox["\"\<747 Lateral Model\>\"",
#& ,
BoxID -> "ResourceTag-747 Lateral Model-Input",
AutoDelete->True]\), "StateSpaceModel"] /. ResourceData[\!\(\*
TagBox["\"\<747 Lateral Model\>\"",
#& ,
BoxID -> "ResourceTag-747 Lateral Model-Input",
AutoDelete->True]\), "Parameters"], i], {i, 2}]](https://www.wolframcloud.com/obj/resourcesystem/images/347/34791ba4-bca5-435c-a10b-d90e2a18cff7/2a5cf6f8585a7fe2.png)