Examples
Basic Examples (2)
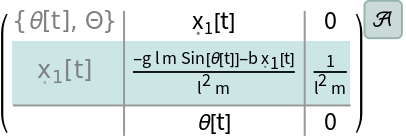
Retrieve the model:
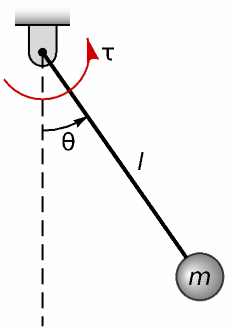
The icon:
Scope & Additional Elements (4)
Available content elements:
The available model types:
The operating point:
The parameters:
Analysis (3)
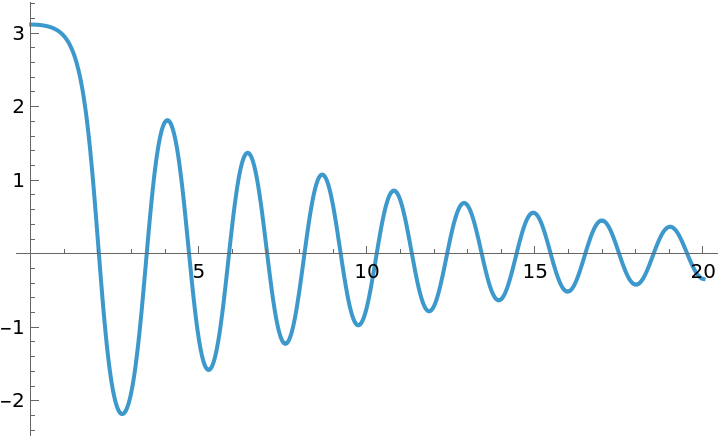
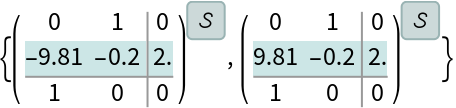
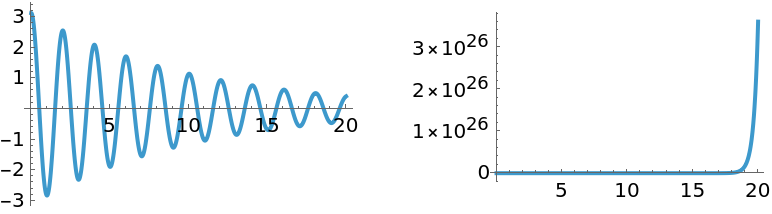
The linear models about the two equilibrium positions for the set of parameter values:The response of the model linearized around 0 is stable, while the one around 180° is unstable:The affine model shows the pendulum reaching the stable equilibrium position from the unstable position:
Bibliographic Citation
Suba Thomas,
"Simple Pendulum Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information

![{ssm0, ssm180} = Table[ResourceData[\!\(\*
TagBox["\"\<Simple Pendulum Model\>\"",
#& ,
BoxID -> "ResourceTag-Simple Pendulum Model-Input",
AutoDelete->True]\), "StateSpaceModel"] /. {\[CapitalTheta] -> ang}, {ang, {0, \[Pi]}}] /. ResourceData[\!\(\*
TagBox["\"\<Simple Pendulum Model\>\"",
#& ,
BoxID -> "ResourceTag-Simple Pendulum Model-Input",
AutoDelete->True]\), "Parameters"]](https://www.wolframcloud.com/obj/resourcesystem/images/385/3859bc47-ff12-44cb-b6d6-db7aa09eb531/0c86417e465c323a.png)
![Grid[{Table[
Plot[Evaluate@
OutputResponse[{sys, {179 °, 0}}, {0}, {t, 0, 20}], {t, 0, 20}, PlotRange -> All], {sys, {ssm0, ssm180}}]}, Spacings -> 2]](https://www.wolframcloud.com/obj/resourcesystem/images/385/3859bc47-ff12-44cb-b6d6-db7aa09eb531/1b7b9148c5c23883.png)
![OutputResponse[{ResourceData[\!\(\*
TagBox["\"\<Simple Pendulum Model\>\"",
#& ,
BoxID -> "ResourceTag-Simple Pendulum Model-Input",
AutoDelete->True]\)] /. \[CapitalTheta] -> \[Pi] /. ResourceData[\!\(\*
TagBox["\"\<Simple Pendulum Model\>\"",
#& ,
BoxID -> "ResourceTag-Simple Pendulum Model-Input",
AutoDelete->True]\), "Parameters"], {179 °, 0}}, {0}, {t, 0, 20}];
Plot[%, {t, 0, 20}, PlotRange -> All]](https://www.wolframcloud.com/obj/resourcesystem/images/385/3859bc47-ff12-44cb-b6d6-db7aa09eb531/0e1b9d77c370d609.png)