Examples
Basic Examples (3)
Retrieve the model:
The icon:
The annotation:
Scope & Additional Elements (4)
Available content elements:
The available model types:
The operating point:
The parameters:
Analysis (11)
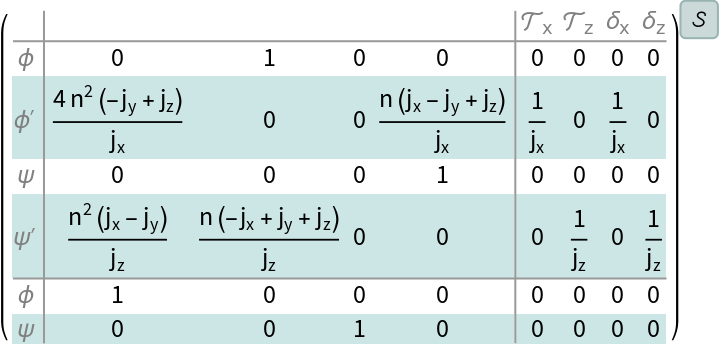
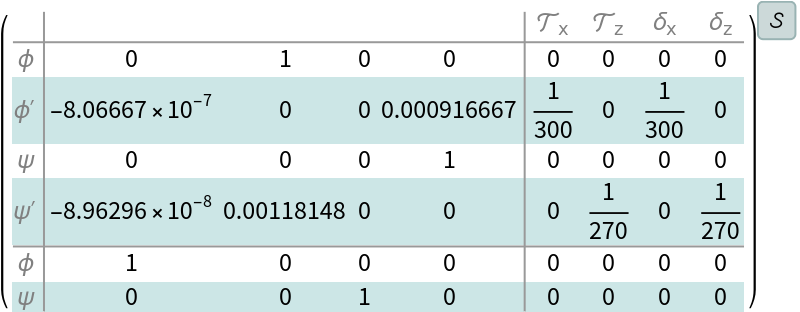
The numerical model:
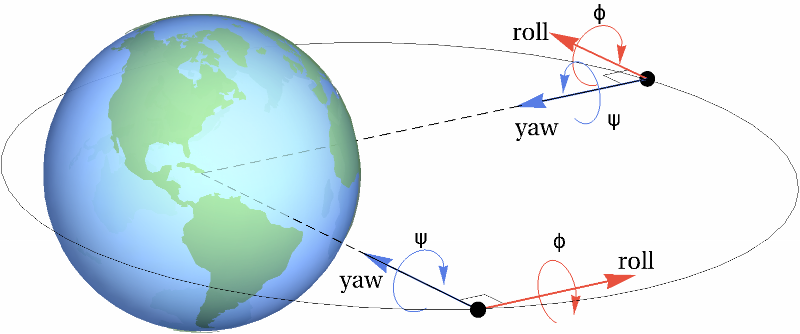
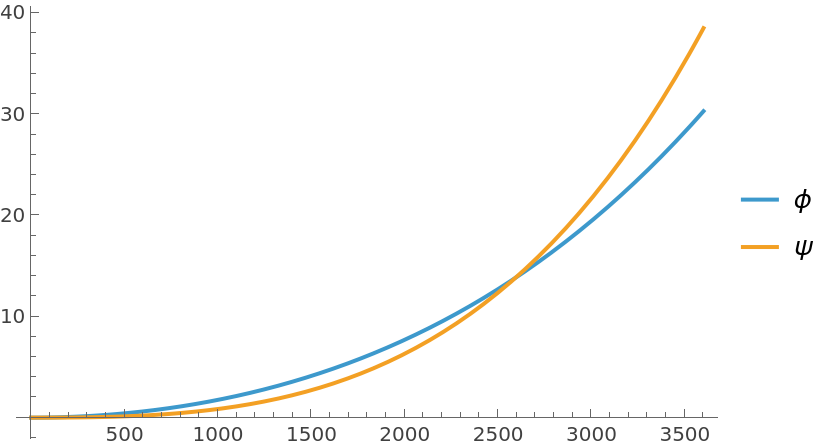
The satellite's roll and yaw angles are unregulated if disturbed:
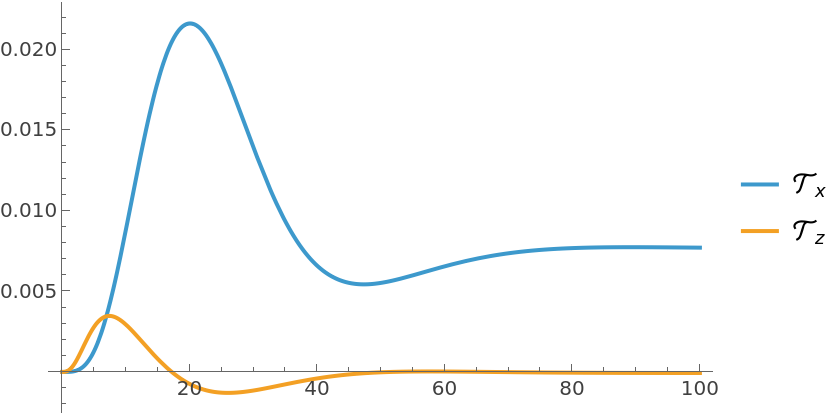
The system specification for a controller design:A set of covariance and weight matrices:Compute an LQG regulator:The closed-loop system:A noisy signal to simulate the process noise:Another one for the sensor noise:The satellite's orbit is regulated by the controller:Obtain the controller model:The control effort:
Bibliographic Citation
Suba Thomas,
"Satellite Roll and Yaw Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information

![sat = ResourceData[\!\(\*
TagBox["\"\<Satellite Roll and Yaw Model\>\"",
#& ,
BoxID -> "ResourceTag-Satellite Roll and Yaw Model-Input",
AutoDelete->True]\)] /. ResourceData[\!\(\*
TagBox["\"\<Satellite Roll and Yaw Model\>\"",
#& ,
BoxID -> "ResourceTag-Satellite Roll and Yaw Model-Input",
AutoDelete->True]\), "Parameters"]](https://www.wolframcloud.com/obj/resourcesystem/images/390/390bd445-ac94-43e3-952b-f9d7820d6822/52ca48e7bdd69ed7.png)

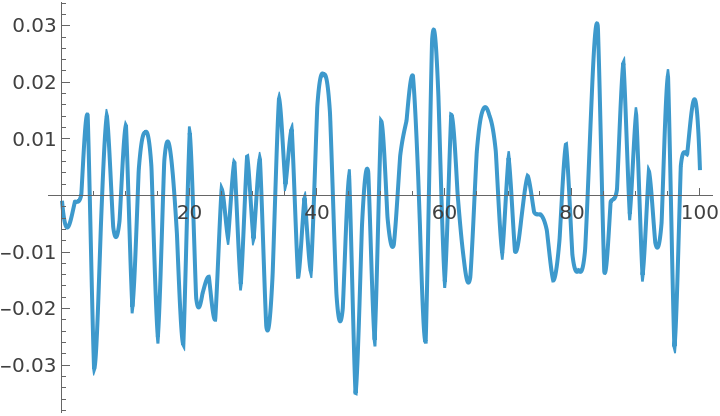
![Thread[{Range[0, n], RandomVariate[NormalDistribution[0, Sqrt[2 10^-4]], {n + 1}]}];
Plot[Subscript[u, w] = Interpolation[%, t], {t, 0, n}]](https://www.wolframcloud.com/obj/resourcesystem/images/390/390bd445-ac94-43e3-952b-f9d7820d6822/545db185532947ca.png)
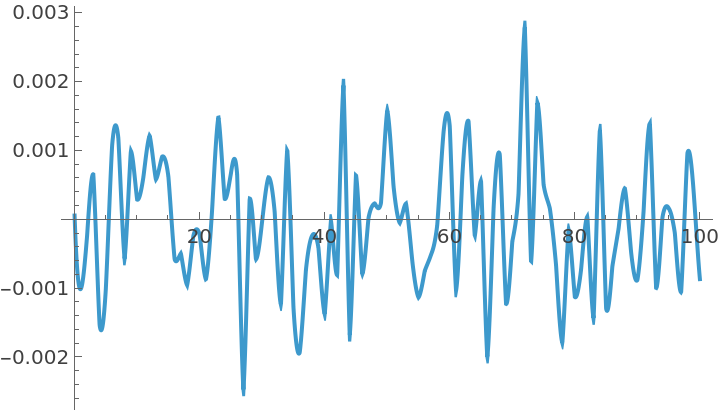
![Thread[{Range[0, n], RandomVariate[NormalDistribution[0, Sqrt[10^-6]], {n + 1}]}];
Plot[Subscript[y, v] = Interpolation[%, t], {t, 0, n}]](https://www.wolframcloud.com/obj/resourcesystem/images/390/390bd445-ac94-43e3-952b-f9d7820d6822/7cf75abd2a6128b1.png)
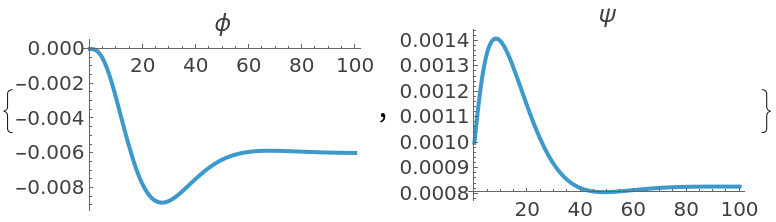
![sr = StateResponse[{csys, {0, 0, 10^-3, 10^-4}}, {0, 0, 0, 0, Subscript[u, w], Subscript[y, v]}, {t, 0, 100}];
Table[Plot[\[ScriptS]\[ScriptR][[1]], {t, 0, 100}, Sequence[
PlotLabel -> Part[\[ScriptS]\[ScriptR], 2], PlotRange -> All, ImageSize -> Small]], {\[ScriptS]\[ScriptR], ({sr[[{1, 3}]], {\[Phi], \[Psi]}}\[Transpose])}]](https://www.wolframcloud.com/obj/resourcesystem/images/390/390bd445-ac94-43e3-952b-f9d7820d6822/173da56462a40c60.png)