Wolfram Data Repository
Immediate Computable Access to Curated Contributed Data
Model of a rotary pendulum
Retrieve the model:
| In[1]:= |
| Out[1]= |  |
The icon:
| In[2]:= |
| Out[2]= | 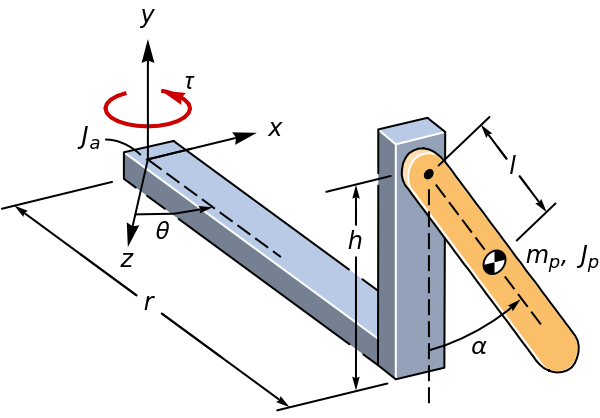 |
Available content elements:
| In[3]:= |
| Out[3]= |  |
The available model types:
| In[4]:= |
| Out[4]= |
The operating point:
| In[5]:= |
| Out[5]= |
The parameters:
| In[6]:= |
| Out[6]= |  |
The numerical model:
| In[7]:= | ![assm = ResourceData[\!\(\*
TagBox["\"\<Rotary Pendulum Model\>\"",
#& ,
BoxID -> "ResourceTag-Rotary Pendulum Model-Input",
AutoDelete->True]\)] /. ResourceData[\!\(\*
TagBox["\"\<Rotary Pendulum Model\>\"",
#& ,
BoxID -> "ResourceTag-Rotary Pendulum Model-Input",
AutoDelete->True]\), "Parameters"]](https://www.wolframcloud.com/obj/resourcesystem/images/3df/3dfbe47f-b22c-4f75-af3c-12f76fde96f0/44ed172d02f833d2.png) |
| Out[7]= |  |
Responses starting from the upright and downright positions:
| In[8]:= |
| Out[8]= |
Both responses settle in the stable downward position:
| In[9]:= |
| Out[9]= | 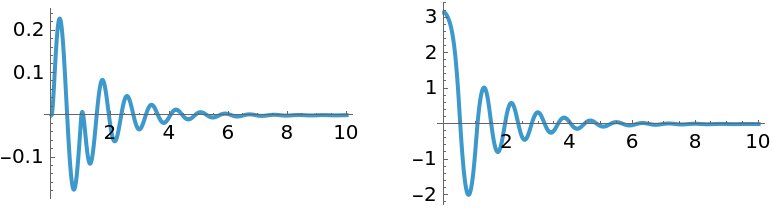 |
Suba Thomas, "Rotary Pendulum Model" from the Wolfram Data Repository (2025)