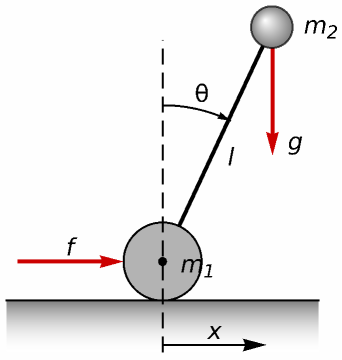
An inverted pendulum model of a Segway personal transport
Examples
Basic Examples (2)
Retrieve the model:
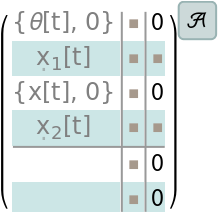
The icon:
Scope & Additional Elements (4)
Available content elements:
The available model types:
The operating point:
The parameters:
Analysis (4)
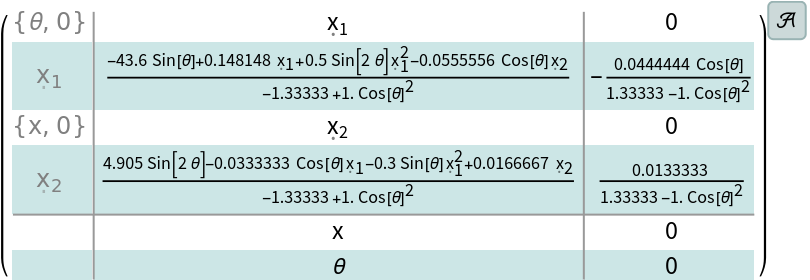
A numerical model of the system:
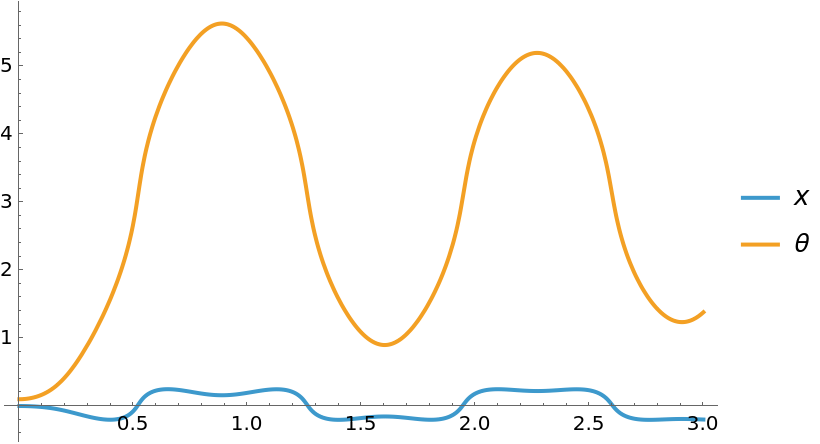
Without a controller, the Segway's position and orientation are not balanced:
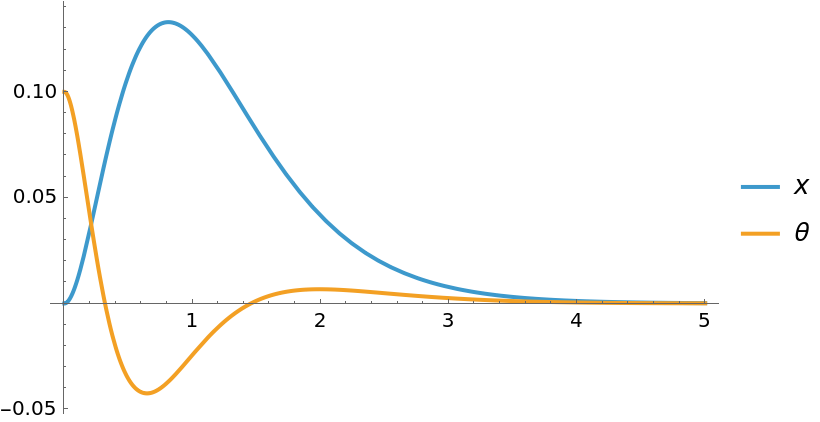
Balance the Segway using a pole-placement:
The Segway remains balance despite the disturbance:
Bibliographic Citation
Suba Thomas,
"Segway Pendulum Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information

![assm = AffineStateSpaceModel[Simplify[ResourceData[\!\(\*
TagBox["\"\<Segway Pendulum Model\>\"",
#& ,
BoxID -> "ResourceTag-Segway Pendulum Model-Input",
AutoDelete->True]\)] /. ResourceData[\!\(\*
TagBox["\"\<Segway Pendulum Model\>\"",
#& ,
BoxID -> "ResourceTag-Segway Pendulum Model-Input",
AutoDelete->True]\), "Parameters"]], Automatic, Automatic, Automatic, None]](https://www.wolframcloud.com/obj/resourcesystem/images/77c/77c0b3f1-4001-4e98-9538-6d7c3803eac2/62518d135e377fd2.png)