Examples
Basic Examples (3)
Retrieve the model:
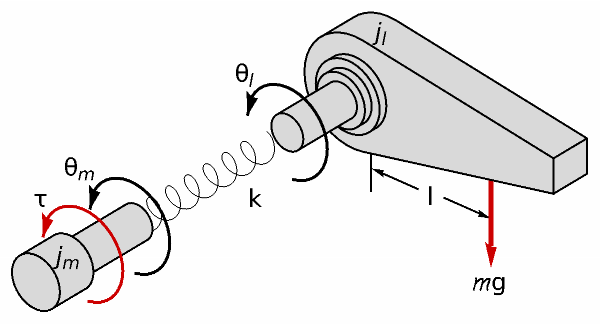
The icon:
The annotation:
Scope & Additional Elements (4)
Available content elements:
The available model types:
The operating point:
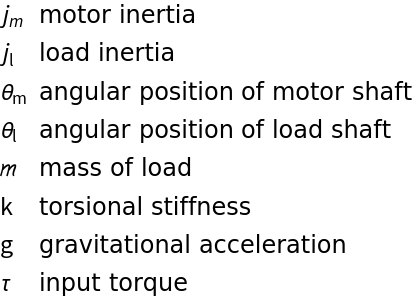
The parameters:
Analysis (3)
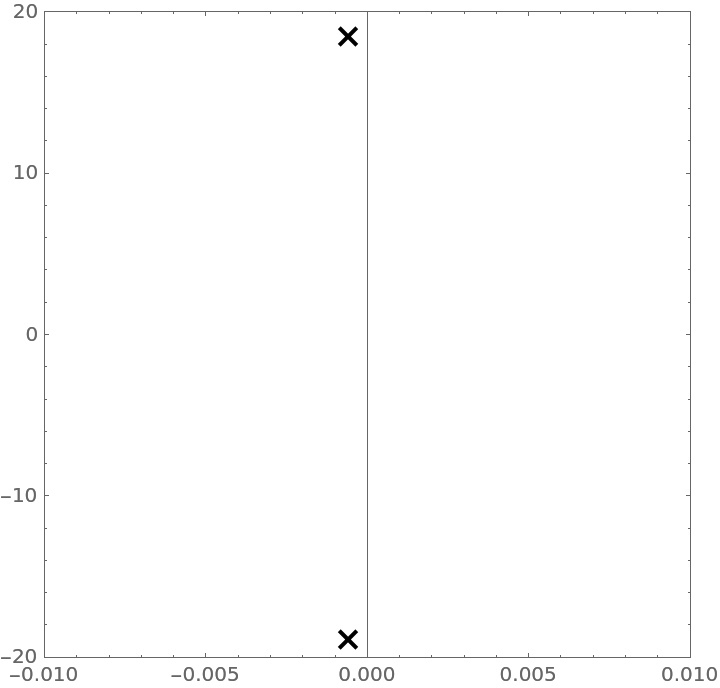
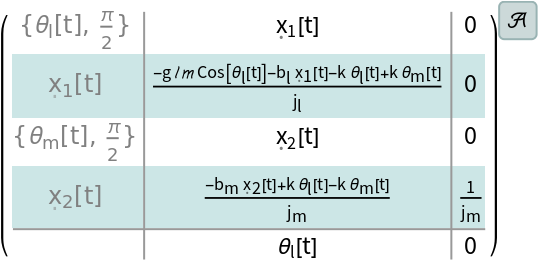
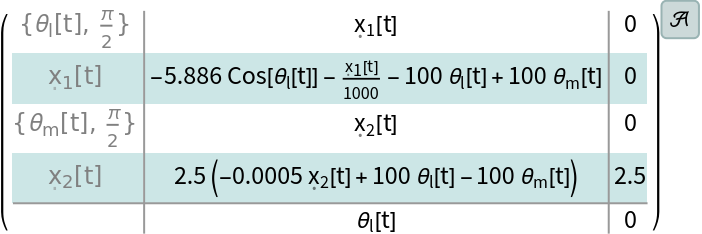
The numerical model:
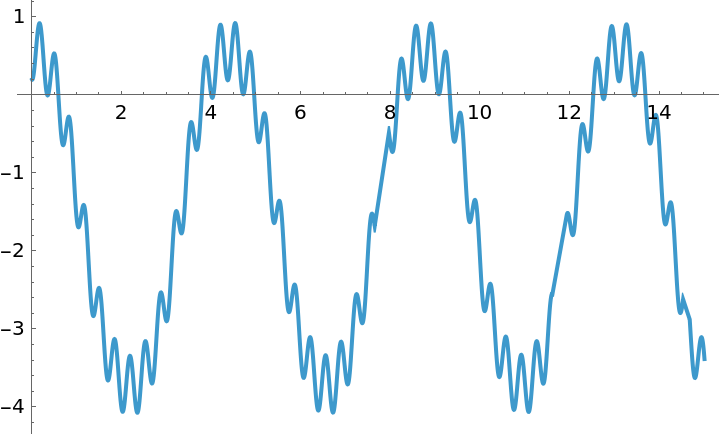
Its angular position is unregulated to a disturbance in its position:
Its response is oscillatory because it has poles very close to the imaginary axis:
Bibliographic Citation
Suba Thomas,
"Flexible Joint Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information

![ComplexListPlot[TransferFunctionPoles[ResourceData[\!\(\*
TagBox["\"\<Flexible Joint Model\>\"",
#& ,
BoxID -> "ResourceTag-Flexible Joint Model-Input",
AutoDelete->True]\), "TransferFunctionModel"] /. ResourceData[\!\(\*
TagBox["\"\<Flexible Joint Model\>\"",
#& ,
BoxID -> "ResourceTag-Flexible Joint Model-Input",
AutoDelete->True]\), "Parameters"]][[1, 1]], Sequence[
AspectRatio -> 1, PlotMarkers -> Style["*", Large,
GrayLevel[0]], Frame -> True, Axes -> {False, True}, PlotRange -> {{-0.01, 0.01}, {-20, 20}}]]](https://www.wolframcloud.com/obj/resourcesystem/images/91a/91a069f6-bed9-422a-b587-69be5caa61c5/0edd6e0f755f8241.png)