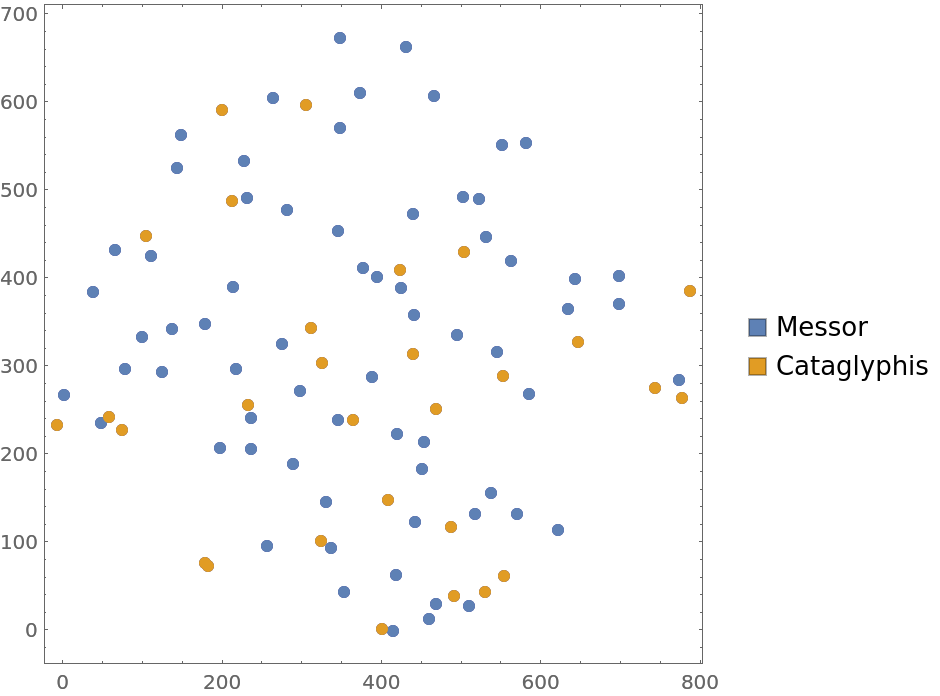
Locations of ant nests with marks denoting two types of species
Examples
Basic Examples (3)
Retrieve the data:
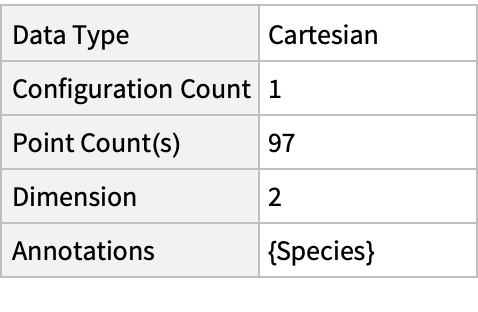
Summary of the spatial point data:
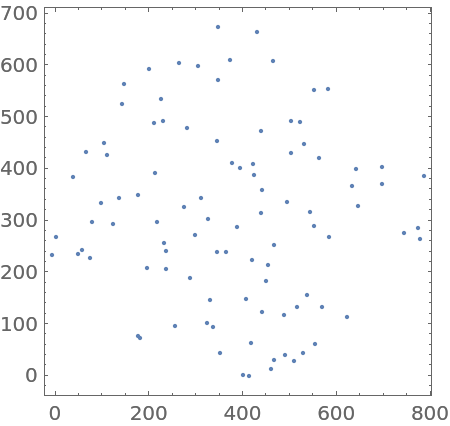
Plot the points:
Scope & Additional Elements (1)
Select subsets based on the species type:
Visualizations (1)
Plot locations with information about species:
Analysis (4)
Test for complete spacial randomness:
Fit a hard core point process to data:
Compute probability of finding a point within given radius of an existing point - NearestNeighborG is the CDF of the nearest neighbor distribution:
Mean distance between a typical point and its nearest neighbor (for positive support distribution can be approximated via a Riemann sum of 1-CDF):
Bibliographic Citation
Gosia Konwerska,
"Ant Nests"
from the Wolfram Data Repository
(2021)
Data Resource History
Publisher Information


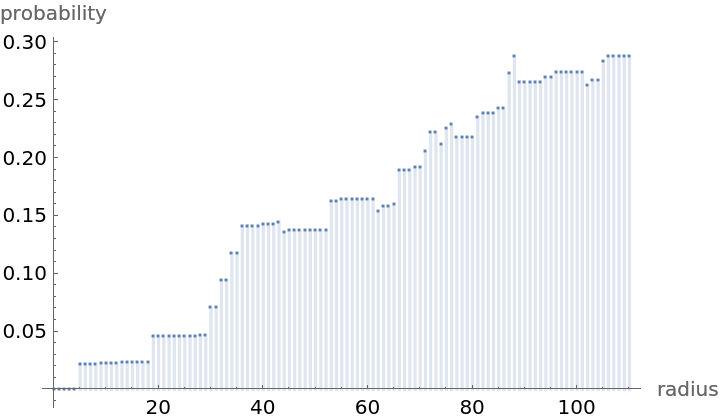
![step = nnG["MaxRadius"]/100.;
partition = Table[{k, k + step}, {k, 0, nnG["MaxRadius"], step}];
values = nnG[Mean /@ partition];](https://www.wolframcloud.com/obj/resourcesystem/images/40b/40be0d7d-14eb-4a9e-8152-9d6b056722de/01ad0ea85ed5550b.png)