Examples
Basic Examples (3)
Retrieve the model:
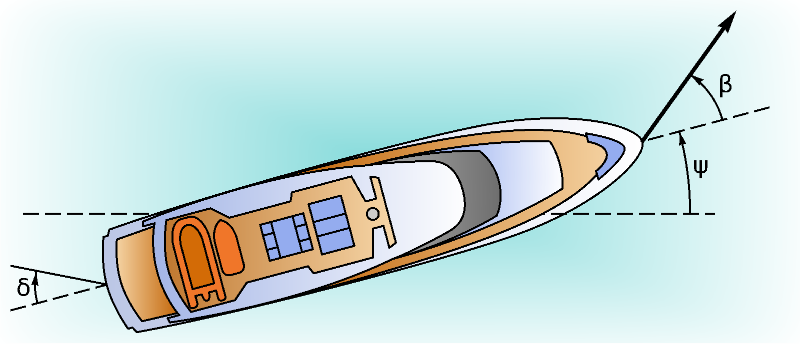
The icon:
The annotation:
Scope & Additional Elements (4)
Available content elements:
The available model types:
The operating point:
The parameters:
Analysis (7)
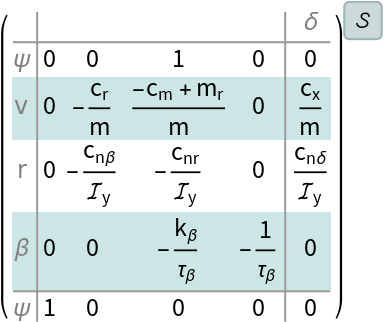
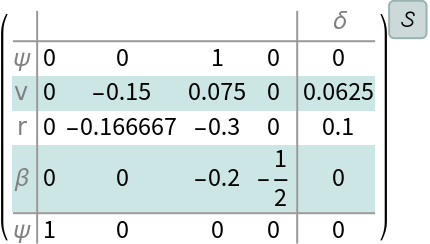
The numerical model:
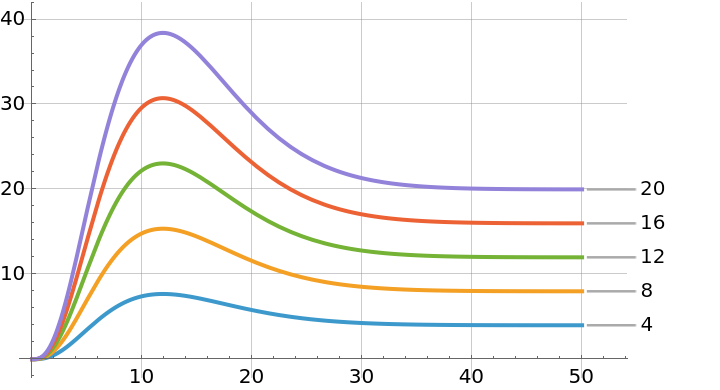
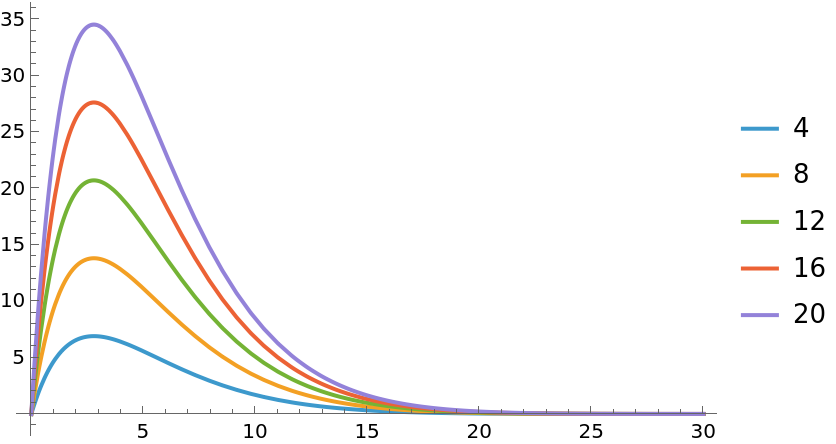
Design a tracking controller with poles at the desired locations:The closed-loop system:The response for various heading angle references:Obtain the controller model:The controller inputs:The control effort increases as the reference value increases:
Bibliographic Citation
Suba Thomas,
"Ship Yaw Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information


![Table[OutputResponse[csys, ref, {t, 0, 50}], {ref, 4, 20, 4}];
Plot[%, {t, 0, 50}, Sequence[
PlotRange -> All, GridLines -> Automatic, PlotLabels -> {4, 8, 12, 16, 20}]]](https://www.wolframcloud.com/obj/resourcesystem/images/7cd/7cddfc77-cc92-4de5-9a79-470776b26661/1357465a1d7aceab.png)