Examples
Basic Examples (2)
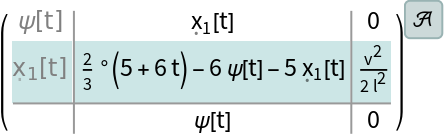
Retrieve the model:
The annotation:
Scope & Additional Elements (4)
Available content elements:
The available model types:
The operating point:
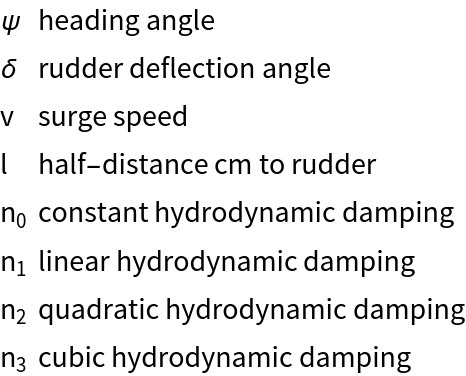
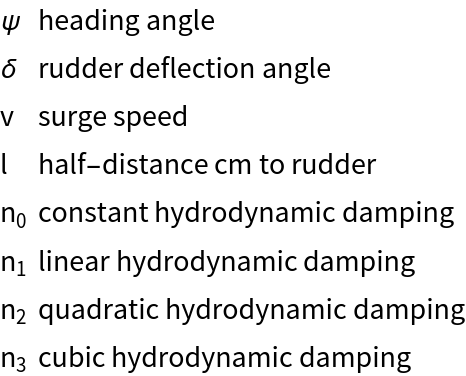
The parameters:
Analysis (6)
The model and its parameters:
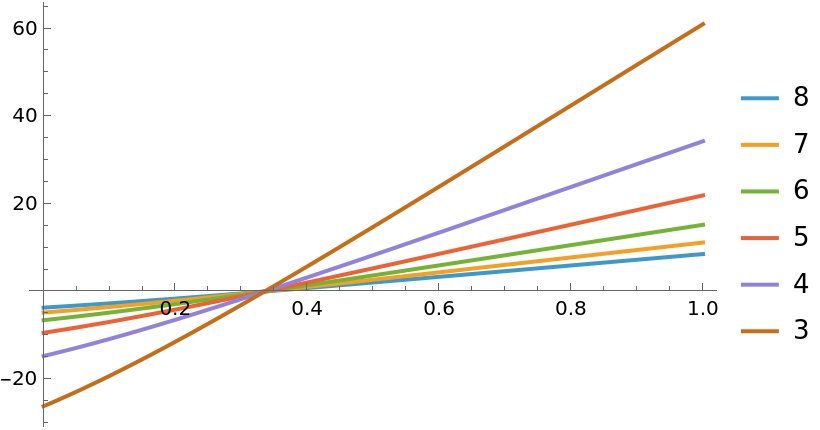
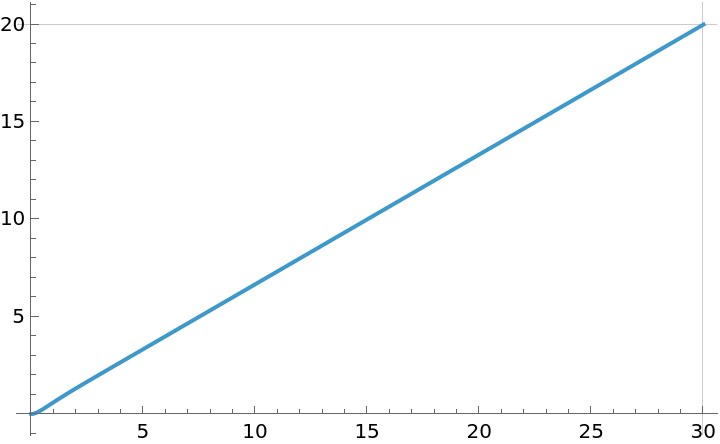
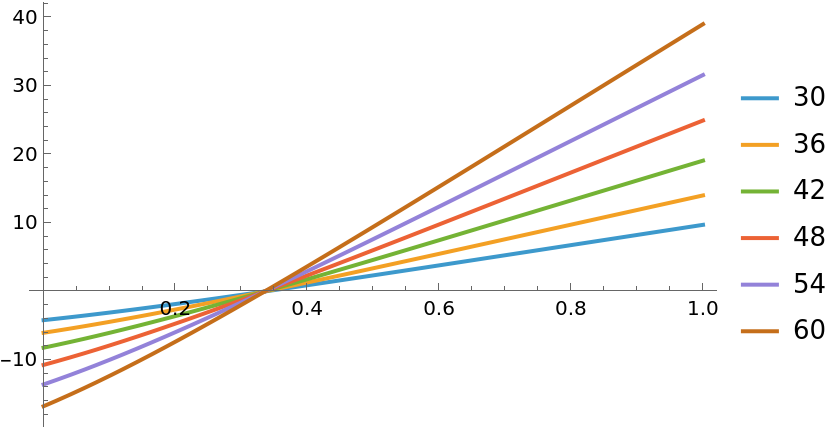
A control law that steers the ship from 0° to 20° in 30 seconds and constant yaw rate:The closed-loop system:The ship is steered as expected:The rudder deflection for various hull lengths:The rudder deflection for various ship speeds:
Bibliographic Citation
Suba Thomas,
"Ship Steering Model"
from the Wolfram Data Repository
(2025)
Data Resource History
Publisher Information
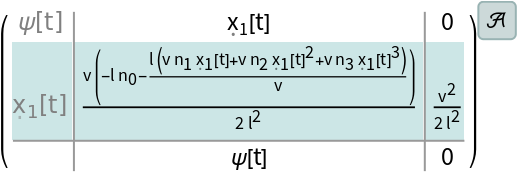

![{asys, pars} = Table[ResourceData[\!\(\*
TagBox["\"\<Ship Steering Model\>\"",
#& ,
BoxID -> "ResourceTag-Ship Steering Model-Input",
AutoDelete->True]\), elems], {elems, {"AffineStateSpaceModel", "Parameters"}}]](https://www.wolframcloud.com/obj/resourcesystem/images/aa6/aa6a3bf6-a5e6-4554-9bd0-8b434e988243/2cb9d8938581a90f.png)

![sr = Thread[{Subscript[\[FormalX], 1][t], Subscript[\[FormalX], 2][t]} -> StateResponse[csys, 0, t]];
Table[fb /. DeleteCases[pars, Rule[l, _]] /. \[Psi][t] -> 20^° t/30 /. sr, {l, Range[30, 60, 6]}] // Flatten;](https://www.wolframcloud.com/obj/resourcesystem/images/aa6/aa6a3bf6-a5e6-4554-9bd0-8b434e988243/3ed6d7604870b652.png)
![Table[fb /. DeleteCases[pars, Rule[v, _]] /. \[Psi][t] -> 20^° t/30 /. sr, {v, Range[8, 3, -1]}] // Flatten;
Plot[%, {t, 0, 1}, PlotLegends -> Range[8, 3, -1], PlotRange -> All]](https://www.wolframcloud.com/obj/resourcesystem/images/aa6/aa6a3bf6-a5e6-4554-9bd0-8b434e988243/1ae349a65081e82e.png)