Wolfram Data Repository
Immediate Computable Access to Curated Contributed Data
A model of a two-link robot
Retrieve the model:
| In[1]:= |
| Out[1]= |  |
The icon:
| In[2]:= |
| Out[2]= | 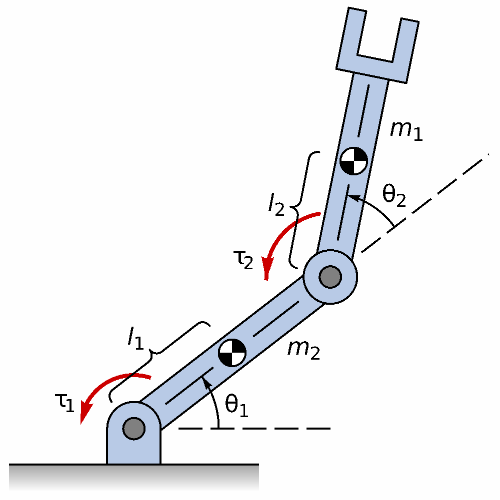 |
Available content elements:
| In[3]:= |
| Out[3]= |  |
The available model types:
| In[4]:= |
| Out[4]= |
The operating point:
| In[5]:= |
| Out[5]= |
The parameters:
| In[6]:= |
| Out[6]= |
Obtain the model about a new operating point:
| In[7]:= |
The angles:
| In[8]:= |
The torques:
| In[9]:= |
| Out[9]= |
The model about the new operating point:
| In[10]:= |
| Out[10]= |  |
Suba Thomas, "Two-link Robot Model" from the Wolfram Data Repository (2025)